• Mengetahui
pengertian sensor ultrasonik
• Mengetahui fungsi komponen yang
digunakan
• Membuat rangkaian aplikasi
sensor ultrasonik
• Mengetahui prinsip kerja sensor ultrasonik
2. Alat dan Bahan [Kembali]
2.1 Alat [Kembali]
a. Voltmeter

Voltmeter adalah alat ukur yang digunakan untuk mengukur tegangan listrik dalam sebuah rangkaian.
2.2 Bahan [Kembali]
a. IC NE555

IC NE555 merupakan salah satu komponen elektronika yang dapat digunakan dalam berbagai aplikasi Timer (pewaktu), sumber pulsa gelombang, dan aplikasi osilator. Selain itu, IC ini juga dapat digunakan sebagaiTimer Delay, rangkaian flip-flop dan pemicu sinyal ultrasonik.
Konfigurasi pin pada IC NE555 :
PIN Fungsi
1. Ground (0V)
Ground adalah pin input dari sumber tegangan DC paling negatif.
2. Trigger
Trigger adalah input negative dari lower komperator (komporator B) yang menjaga osilasi tegangan terendah kapasitor pada 1/3 VCC dan mengatur RS flip-flop.
3. Output
Output adalah pin keluaran dari IC NE555.
4. Reset
Reset adalah pin yang berfungsi untuk mereset latch didalam IC yang akan berpengaruh untuk mereset kerja IC. Pin ini tersambung ke suatu gate (gerbang) transistor bertipe PNP, jadi transistor akan aktif jika diberi logika low. Biasanya pin ini langsung dihubungkan ke VCC agar tidak terjadi reset.
5.
Control Voltage
Pin ini berfungsi untuk mengatur kestabilan tegangan refrensi input negative (komparator A), pin ini bisa dibiarkan tergantung (diabaikan), tetapi untuk menjamin kestabilan refrensi komporator A, biasanya dihubungkan dengan kapasitor berorde sekitar 10nF ke pin ground.
6. Threshold
Pin ini terhubung ke input positif (komporator A) yang akan mereset RS flip-flop ketika tegangan pada pin ini mulai melebihi 2/3 VCC.
7. Dischargep
Pin ini terhubung ke open collector transistor internal (Tr) yang emitternya terhubung ke ground. Switching transistor ini berfungsi untuk meng-clamp node yang sesuai ke ground pada timing tertentu.
8. Vcc
Pin ini untuk menerima supply DC voltage. Biasanya akan bekerja optimal jika diberi 5V s/d 15V.
Spesifikasi:



b. Baterai

c. Resistor

Spesifikasi:


d. Transistor NPN (2CS1162)

Spesifikasi



e. Relay

Spesifikasi Relay umumnya adalah tegangan input 5 VDC, 12 VDC atau 48 VDC. Untuk common dan NO NC umumnya 220 vac dengan arus kerja 10 A.


Spesifikasi

f. Button

g. Kapasitor


h. Sensor ultrasonik

Sensor ultrasonik adalah sebuah sensor yang berfungsi untuk mengubah besaran fisis (bunyi) menjadi besaran listrik dan sebaliknya.
Konfigurasi pin:
• VCC = 5V Power Supply. Pin sumber tegangan positif sensor.
• Trig = Trigger/Penyulut. Pin ini yang digunakan untuk membangkitkan sinyal ultrasonik.
• Echo = Receive/Indikator. Pin ini yang digunakan untuk mendeteksi sinyal pantulan ultrasonik.
• GND = Ground/0V Power Supply. Pin sumber tegangan negatif sensor.
Spesifikasi:

i. Ground

Ground adalah titik kembalinya arus searah atau titik kembalinya sinyal bolak balik atau titik patokan dari berbagai titik tegangan dan sinyal listrik dalam rangkaian elektronika.
j. PIR Sensor

Sensor PIR (Passive Infra Red) adalah sensor yang digunakan untuk mendeteksi adanya pancaran sinar infra merah dari suatu object. Sensor PIR bersifat pasif, artinya sensor ini tidak memancarkan sinar infra merah tetapi hanya menerima radiasi sinar infra merah dari luar.

LED merupakan sebuah komponen elektromagnetik yang dapat memancarkan cahaya monokromatik melalui tegangan maju. LED terbuat dari bahan semikonduktor yang merupakan keluarga dioda. LED dapat memancarkan berbagai warna, tergantung dari bahan semikonduktor yang digunakan.
Spesifikasi:



Motor DC digunakan sebagai output dari rangkaian dan juga merupakan alat yang dapat mengubah energi listrik menjadi energi listrik menjadi energi gerak berupa putaran.
Konfigurasi pin:

Pin 1 : Terminal 1
Pin 2 : Terminal 2
a. IC NE555

IC NE555 merupakan salah satu komponen elektronika yang dapat digunakan dalam berbagai aplikasi Timer (pewaktu), sumber pulsa gelombang, dan aplikasi osilator. Selain itu, IC ini juga dapat digunakan sebagai Timer Delay, rangkaian flip-flop dan pemicu sinyal ultrasonik.
Diagram IC NE555

Rangkaian IC 555 kita dapat mengatur besar Frekuensi dan Duty Cyclenya dengan mengatur nilai R1, R2 dan C1.
Rumus menghitung Frekuensi IC 555 adalah :
F = 1,44 / {(R1 + 2R2) * C1}
Pada diagram blok, internal IC NE555 yang kecil ini terdiri dari: 2 buah komparator (Pembanding tegangan), 3 buah Resistor sebagai pembagi tengangan, 2 buah Transistor (dalam praktek dan analisis kerjanya, transistor yang terhubung pada pin 4 biasanya langsung dihubungkan ke Vcc), 1 buah Flip-flop S-R yang akan mengatur output pada keadaan logika tertentu, dan 1 buah inverter.
b. Baterai
Baterai merupakan sebuah alat yang mengubah energi kimia yang tersimpan menjadi energi listrik. Pada percobaan kali ini, baterai berfungsi sebagai sumber daya.
c. Resistor

Resistor memiliki nilai resistansi atau hambatan yang berfungsi untuk menghambat dan mengatur arus listrik yang mengalir dalam rangkaian. Resistor memiliki dua pin untuk mengukur tegangan listrik dan arus listrik, dengan resistansi tertentu yang dapat menghasilkan tegangan listrik di antara kedua pin. Nilai tegangan terhadap resistansi berbanding lurus dengan arus yang mengalir.
Cara menghitung nilai resistor:
Tabel dibawah ini adalah warna-warna yang terdapat di tubuh resistor :

Masukkan angka langsung dari kode warna gelang ke-1 (pertama)
Masukkan angka langsung dari kode warna gelang ke-2
Masukkan Jumlah nol dari kode warna gelang ke-3 atau pangkatkan angka tersebut dengan 10 (10^n)
Gelang ke 4 merupakan toleransi dari nilai resistor tersebut
Perhitungan untuk resistor dengan 5 gelang warna :
Masukkan angka langsung dari kode warna gelang ke-1 (pertama)
Masukkan angka langsung dari kode warna gelang ke-2
Masukkan angka langsung dari kode warna gelang ke-3
Masukkan Jumlah nol dari kode warna gelang ke-4 atau pangkatkan angka tersebut dengan 10 (10^n)
Gelang ke 5 merupakan toleransi dari nilai resistor tersebut.
d. LED

LED merupakan sebuah komponen yang menghasilkan cahaya monokromatik ketika diberi tegangan. LED terbuat dari semikonduktor dan perbedaan warna yang dihasilkan disebabkan perbedaan bahan semikonduktor yang digunakan.
LED merupakan keluarga dari Dioda yang terbuat dari Semikonduktor. Cara kerjanya pun hampir sama dengan Dioda yang memiliki dua kutub yaitu kutub Positif (P) dan Kutub Negatif (N). LED hanya akan memancarkan cahaya apabila dialiri tegangan maju (bias forward) dari Anoda menuju ke Katoda.
LED terdiri dari sebuah chip semikonduktor yang di doping sehingga menciptakan junction P dan N. Yang dimaksud dengan proses doping dalam semikonduktor adalah proses untuk menambahkan ketidakmurnian (impurity) pada semikonduktor yang murni sehingga menghasilkan karakteristik kelistrikan yang diinginkan. Ketika LED dialiri tegangan maju atau bias forward yaitu dari Anoda (P) menuju ke Katoda (K), Kelebihan Elektron pada N-Type material akan berpindah ke wilayah yang kelebihan Hole (lubang) yaitu wilayah yang bermuatan positif (P-Type material). Saat Elektron berjumpa dengan Hole akan melepaskan photon dan memancarkan cahaya monokromatik (satu warna).

e. Transistor NPN (2SC1162)
Transistor merupakan alat semikonduktor yang dapat digunakan sebagai penguat sinyal, pemutus atau penyambung sinyal, stabilisasi tegangan, dan fungsi lainnya. Transistor memiliki 3 kaki elektroda, yaitu basis, kolektor, dan emitor. Pada rangkaian kali ini digunakan transistor 2SC1162 bertipe NPN. Transistor ini diperumpamakan sebagai saklar, yaitu ketika kaki basis diberi arus, maka arus pada kolektor akan mengalir ke emiter yang disebut dengan kondisi ON. Sedangkan ketika kaki basis tidak diberi arus, maka tidak ada arus mengalir dari kolektor ke emitor yang disebut dengan kondisi OFF. Namun, jika arus yang diberikan pada kaki basis melebihi arus pada kaki kolektor atau arus pada kaki kolektor adalah nol (karena tegangan kaki kolektor sekitar 0,2 - 0,3 V), maka transistor akan mengalami cutoff (saklar tertutup).
Transistor adalah sebuah komponen di dalam elektronika yang diciptakan dari bahan-bahan semikonduktor dan memiliki tiga buah kaki. Masing-masing kaki disebut sebagai basis, kolektor, dan emitor.
Emitor (E) memiliki fungsi untuk menghasilkan elektron atau muatan negatif.
Kolektor (C) berperan sebagai saluran bagi muatan negatif untuk keluar dari dalam transistor.
Basis (B) berguna untuk mengatur arah gerak muatan negatif yang keluar dari transistor melalui kolektor.
f. Relay

Pada dasarnya, Relay terdiri dari 4 komponen dasar yaitu :
- Electromagnet (Coil)
- Armature
- Switch Contact Point (Saklar)
- Spring
Berikut ini merupakan gambar dari bagian-bagian relay :

Kontak Poin (Contact Point) Relay terdiri dari 2 jenis yaitu :
- Normally Close (NC) yaitu kondisi awal sebelum diaktifkan akan selalu berada di posisi CLOSE (tertutup)
- Normally Open (NO) yaitu kondisi awal sebelum diaktifkan akan selalu berada di posisi OPEN (terbuka)
g. Button

Button diibaratkan sebagai objek ketika melewati pancaran sinyal dari sensor ultrasonik.
h. Kapasitor
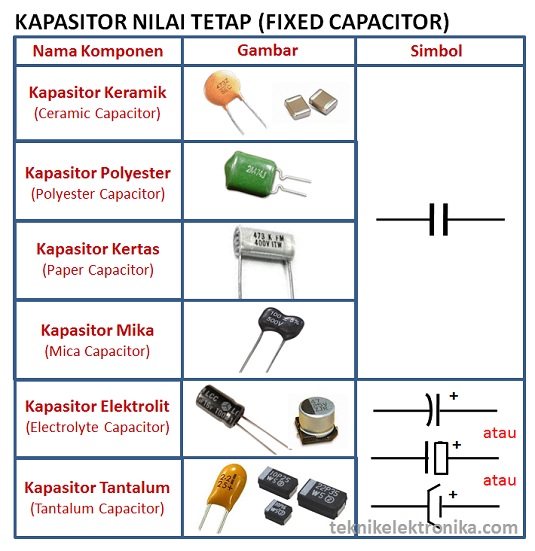
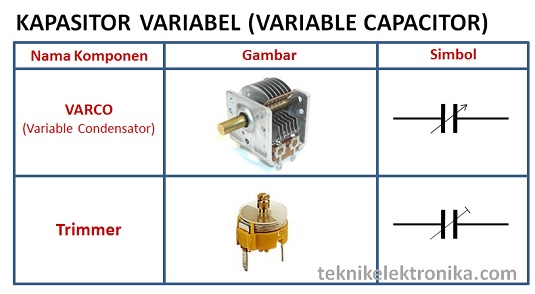
Kapasitor merupakan salah satu komponen elektronika yang sangat penting fungsinya. Pengertian kapasitor adalah suatu komponen elektronika yang dapat menyimpan dan melepaskan muatan listrik atau energi listrik. Selain itu, kapasitor juga dapat berfungsi sebagai penyaring frekuensi. Kapasitor memiliki berbagai macam ukuran dan bentuk tergantung dari kapasitas, tegangan kerja dan faktor lainnya yang berpengaruh. Kapasitor sering disebut juga dengan kondensator. Fungsi kapasitor untuk menyimpan muatan listrik disebut dengan kapasitansi atau kapasitas. Kapasitor memiliki simbol C (Capasitor) sedangkan fungsi kapasitor dalam menyimpan muatan listrik disimbolkan oleh F (Farad). Disimbolkan dengan Farad karena yang menemukan kapasitor adalah Michael Faraday (1791 – 1867).
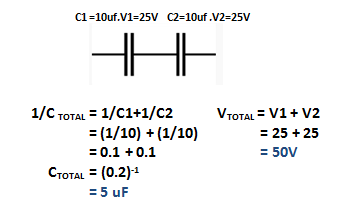
Rumus Kapasitansi Kapasitor
C = Q×V
i. Sensor Ultrasonik

Sensor Ultrasonik adalah sensor untuk mengubah suara (gelombang ultrasonik) menjadi arus listrik dan sebaliknya. Gelombang ultrasonik dibangkitkan melalui piezoelektrik yang pada umumnya berfrekuensi 40kHz. Prinsip kerjanya yaitu dengan mengirimkan (suara) gelombang ultrasonik dengan frekuensi tertentu ke depan oleh Trigger (pengirim sinyal suara). Lalu, ketika ada objek yang melewati gelombang tersebut, maka suara tersebut akan terpantul dan kembali ke Echo (penerima sinyal suara). Kemudian, sensor akan menghitung selisih waktu ketika sinyal dikirim dengan waktu ketika sinyal kembali.

Pemilihan HC-SR04 sebagai sensor jarak yang akan digunakan pada alat ini karena memiliki fitur sebagai berikut; kinerja yang stabil, pengukuran jarak yang akurat dengan ketelitian 0,3 cm, pengukuran maksimum dapat mencapai 4 meter dengan jarak minimum 2 cm, ukuran yang ringkas dan dapat beroperasi pada level tegangan TTL Prinsip pengoperasian sensor ultrasonik HC-SR04 adalah sebagai berikut ; awali dengan memberikan pulsa Low (0) ketika modul mulai dioperasikan, kemudian berikan pulsa High (1) pada trigger selama 10 µs sehingga modul mulai memancarkan 8 gelombang kotak dengan frekuensi 40 KHz, tunggu hingga transisi naik terjadi pada output dan mulai perhitungan waktu hingga transisi turun terjadi, setelah itu gunakan Persamaan 2.1 untuk mengukur jarak antara sensor dengan objek. Timing diagram pengoperasian sensor ultrasonik HC-SR04 diperlihatkan pada Gambar.

Sensor ultrasonik terdiri dari dari dua unit, yaitu unit pemancar dan unit penerima. Struktur unit pemancar dan penerima sangatlah sederhana, sebuah kristal piezoelectric dihubungkan dengan mekanik jangkar dan hanya dihubungkan dengan diafragma penggetar. Tegangan bolak-balik yang memiliki frekuensi kerja 40 KHz – 400 KHz diberikan pada plat logam. Struktur atom dari kristal piezoelectric akan berkontraksi (mengikat), mengembang atau menyusut terhadap polaritas tegangan yang diberikan, dan ini disebut dengan efek piezoelectric.
-Pemancar Ultrasonik (Transmitter)

Prinsip kerja dari rangkaian pemancar gelombang ultrasonik tersebut adalah sebagai berikut :
1. Sinyal 40 kHz dibangkitkan melalui mikrokontroler.
2. Sinyal tersebut dilewatkan pada sebuah resistor sebesar 3kOhm untuk pengaman ketika sinyal tersebut membias maju rangkaian dioda dan transistor.
3. Kemudian sinyal tersebut dimasukkan ke rangkaian penguat arus yang merupakan kombinasi dari 2 buah dioda dan 2 buah transistor.
4. Ketika sinyal dari masukan berlogika tinggi (+5V) maka arus akan melewati dioda D1 (D1 on), kemudian arus tersebut akan membias transistor T1, sehingga arus yang akan mengalir pada kolektotr T1 akan besar sesuai dari penguatan dari transistor.
Ketika sinyal dari masukan berlogika tinggi (0V) maka arus akan melewati dioda D2 (D2 on), kemudian arus tersebut akan membias transistor T2, sehingga arus yang akan mengalir pada kolektotr T2 akan besar sesuai dari penguatan dari transistor. Resistor R4 dan R6 berfungsi untuk membagi tengangan menjadi 2,5 V. Sehingga pemancar ultrasonik akan menerima tegangan bolak – balik dengan Vpeak-peak adalah 5V (+2,5 V s.d - 2,5 V).
-Penerima Ultrasonik (Receiver)

- Pertama – tama sinyal yang diterima akan dikuatkan terlebih dahulu oleh rangkaian transistor penguat Q2.
- Kemudian sinyal tersebut akan di filter menggunakan High pass filter pada frekuensi > 40kHz oleh rangkaian transistor Q1.
- Setelah sinyal tersebut dikuatkan dan di filter, kemudian sinyal tersebut akan disearahkan oleh rangkaian dioda D1 dan D2.
- Kemudian sinyal tersebut melalui rangkaian filter low pass filter pada frekuensi < 40kHz melalui rangkaian filter C4 dan R4.
- Setelah itu sinyal akan melalui komparator Op-Amp pada U3.
- Jadi ketika ada sinyal ultrasonik yang masuk ke rangkaian, maka pada komparator akan mengeluarkan logika rendah (0V) yang kemudian akan diproses oleh mikrokontroler untuk menghitung jaraknya.
Grafik Sensor Ultrasonik


- Titik kembali nya arus atau sinyal listrik
- Pelindung terhadap gelombang elektromagnetik dari udara sekitar
- Pengaman setrum jika ada kerusakan (ground sesungguhnya)
- Titik patokan (referensi) tegangan atau sinyal dari berbagai titik di rangkaian.
- Menghilangkan dengung (hum) pada penguat audio (amplifier)
- Mengurangi Noise pada penguat audio (amplifier)
- Pada kendaraan (mobil atau motor) mengurangi kebutuhan kabel listrik, karena menjadikan body motor atau mobil sebagai pengganti kabel negatif.
- dll.
k. Motor DC

Motor Listrik DC atau DC Motor adalah suatu perangkat yang mengubah energi listrik menjadi energi kinetik atau gerakan (motion). Motor DC ini juga dapat disebut sebagai Motor Arus Searah. Seperti namanya, DC Motor memiliki dua terminal dan memerlukan tegangan arus searah atau DC (Direct Current) untuk dapat menggerakannya. Motor Listrik DC ini biasanya digunakan pada perangkat-perangkat Elektronik dan listrik yang menggunakan sumber listrik DC seperti Vibrator Ponsel, Kipas DC dan Bor Listrik DC.

Prinsip Kerja Motor DC
Terdapat dua bagian utama pada sebuah Motor Listrik DC, yaitu Stator dan Rotor. Stator adalah bagian motor yang tidak berputar, bagian yang statis ini terdiri dari rangka dan kumparan medan. Sedangkan Rotor adalah bagian yang berputar, bagian Rotor ini terdiri dari kumparan Jangkar. Dua bagian utama ini dapat dibagi lagi menjadi beberapa komponen penting yaitu diantaranya adalah Yoke (kerangka magnet), Poles (kutub motor), Field winding (kumparan medan magnet), Armature Winding (Kumparan Jangkar), Commutator (Komutator) dan Brushes (kuas/sikat arang).
Pada prinsipnya motor listrik DC menggunakan fenomena elektromagnet untuk bergerak, ketika arus listrik diberikan ke kumparan, permukaan kumparan yang bersifat utara akan bergerak menghadap ke magnet yang berkutub selatan dan kumparan yang bersifat selatan akan bergerak menghadap ke utara magnet. Saat ini, karena kutub utara kumparan bertemu dengan kutub selatan magnet ataupun kutub selatan kumparan bertemu dengan kutub utara magnet maka akan terjadi saling tarik menarik yang menyebabkan pergerakan kumparan berhenti.
Untuk menggerakannya lagi, tepat pada saat kutub kumparan berhadapan dengan kutub magnet, arah arus pada kumparan dibalik. Dengan demikian, kutub utara kumparan akan berubah menjadi kutub selatan dan kutub selatannya akan berubah menjadi kutub utara. Pada saat perubahan kutub tersebut terjadi, kutub selatan kumparan akan berhadap dengan kutub selatan magnet dan kutub utara kumparan akan berhadapan dengan kutub utara magnet. Karena kutubnya sama, maka akan terjadi tolak menolak sehingga kumparan bergerak memutar hingga utara kumparan berhadapan dengan selatan magnet dan selatan kumparan berhadapan dengan utara magnet. Pada saat ini, arus yang mengalir ke kumparan dibalik lagi dan kumparan akan berputar lagi karena adanya perubahan kutub. Siklus ini akan berulang-ulang hingga arus listrik pada kumparan diputuskan.
l. PIR Sensor
Sensor PIR (Passive Infra Red) adalah sensor yang digunakan untuk mendeteksi adanya pancaran sinar infra merah. Sensor PIR bersifat pasif, artinya sensor ini tidak memancarkan sinar infra merah tetapi hanya menerima radiasi sinar infra merah dari luar. Sensor ini biasanya digunakan dalam perancangan detektor gerakan berbasis PIR. Karena semua benda memancarkan energi radiasi, sebuah gerakan akan terdeteksi ketika sumber infra merah dengan suhu tertentu (misal: manusia) melewati sumber infra merah yang lain dengan suhu yang berbeda (misal: dinding), maka sensor akan membandingkan pancaran infra merah yang diterima setiap satuan waktu, sehingga jika ada pergerakan maka akan terjadi perubahan pembacaan pada sensor. Sensor PIR terdiri dari beberapa bagian yaitu :
Lensa Fresnel pertama kali digunakan pada tahun 1980an. Digunakan sebagai lensa yang memfokuskan sinar pada lampu mercusuar. Penggunaan paling luas pada lensa Fresnel adalah pada lampu depan mobil, di mana mereka membiarkan berkas parallel secara kasar dari pemantul parabola dibentuk untuk memenuhi persyaratan pola sorotan utama. Namun kini, lensa Fresnel pada mobil telah ditiadakan diganti dengan lensa plain polikarbonat. Lensa Fresnel juga berguna dalam pembuatan film, tidak hanya karena kemampuannya untuk memfokuskan sinar terang, tetapi juga karena intensitas cahaya yang relative konstan diseluruh lebar berkas cahaya.
b. IR Filter
IR Filter dimodul sensor PIR ini mampu menyaring panjang gelombang sinar infrared pasif antara 8 sampai 14 mikrometer, sehingga panjang gelombang yang dihasilkan dari tubuh manusia yang berkisar antara 9 sampai 10 mikrometer ini saja yang dapat dideteksi oleh sensor. Sehingga Sensor PIR hanya bereaksi pada tubuh manusia saja.
c. Pyroelectric Sensor
Seperti tubuh manusia yang memiliki suhu tubuh kira-kira 32˚C, yang merupakan suhu panas yang khas yang terdapat pada lingkungan. Pancaran sinar inframerah inilah yang kemudian ditangkap oleh Pyroelectric sensor yang merupakan inti dari sensor PIR ini sehingga menyebabkan Pyroelectic sensor yang terdiri dari galium nitrida, caesium nitrat dan litium tantalate menghasilkan arus listrik. Mengapa bisa menghasilkan arus listrik? Karena pancaran sinar inframerah pasif ini membawa energi panas. Material pyroelectric bereaksi menghasilkan arus listrik karena adanya energi panas yang dibawa oleh infrared pasif tersebut. Prosesnya hampir sama seperti arus listrik yang terbentuk ketika sinar matahari mengenai solar cell.
d. Amplifier
Sebuah sirkuit amplifier yang ada menguatkan arus yang masuk pada material pyroelectric.
e. Komparator
Setelah dikuatkan oleh amplifier kemudian arus dibandingkan oleh komparator sehingga mengahasilkan output.

Hampir semua jenis sensor PIR akan memiliki spesifikasi memiliki perbedaan, meskipun semuanya memiliki cara kerja yang sama. Dapat cek perbedaan tersebut dalam datasheet.
• Ukuran : Persegi
• Output : Nilai Digital High (3V) saat dipicu (gerakan terdeteksi), dan nilai digital Low saat menganggur (tidak ada gerakan terdeteksi). Panjang pulsa ditentukan oleh resistor dan kapasitor pada PCB.
• Jangkauan sensitivitas : sampai 20 kaki (6 meters) 110 derajat x 70 derajat jangkauan deteksi
• Power supply: 3.3V - 5V tegangan input.

Pada grafik tersebut ; (a) Arah yang berbeda mengasilkan tegangan yang bermuatan berbeda ; (b) Semakin dekat jarak objek terhadap sensor PIR, maka semakin besar tegangan output yang dihasilkan ; (c) Semakin cepat objek bergerak, maka semakin cepat terdeteksi oleh sensor PIR karena infrared yang ditimbulkan dengan lebih cepat oleh objek semakin mudah dideteksi oleh PIR, namun semakin sedikit juga waktu yang dibutuhkan karena sudah diluar jangkauan sensor PIR.

Dari grafik, didapatkan bahwa suhu juga mempengaruhi seberapa jauh PIR dapat mendeteksi adanya infrared dimana semakin tinggi suhu disekitar maka semakin pendek jarak yang bisa diukur oleh PIR.
4. Percobaan [Kembali]
4.1 Prosedur Percobaan[Kembali]
Buka aplikasi proteus
Siapkan alat dan bahan pada library proteus, pada rangkaian ini yaitu berupa baterai, power, resistor, IC NE555, kapasitor, button, transistor, sensor ultrasonik, sensor PIR, motor DC, relay, LED, dan ground.
Rangkai setiap komponen
Ubah spesifikasi komponen sesuai kebutuhan
Simulasikan rangkaian
4.2 Rangkaian Simulasi [Kembali]
Ketika Sensor PIR mendeteksi adanya objek (berlogika 1)


Prinsip Kerja:
Pada rangkaian ini, sensor PIR berfungsi untuk mendeteksi objek yang baru datang (mobil saat parkir), ketika sensor PIR berlogika 0 (tidak terdeteksi objek), tidak ada arus yang mengalir sehingga motor tidak hidup. Ketika sensor PIR berlogika 1, arus pada Vout yang merupakan kaki basis transistor Q2 akan mengalir dari basis transistor ke emitter lalu ke ground. Kemudian arus mengalir dari BAT3 dan BAT4 sehingga mengaktifkan relay, maka motor DC hidup. Namun kondisi ketika objek mulai mendekati sensor ultrasonik (ditandai dengan ditekannya button), maka sensor PIR tidak dapat menghidupkan motor.
Rangkaian sensor ultrasonik tersebut terdiri dari dua unit, yaitu Trigger dan Echo. Pada bagian Trigger, digunakan IC NE555 untuk memicu sinyal ultrasonik. Mulanya, tegangan pada baterai akan mengalir menuju button dimana button tersebut dijadikan sebagai objek yang akan melewati sensor ultrasonik. Ketika ada objek (button ditekan), arus akan mengalir menuju IC NE555 yang kemudian memicu timbulnya sinyal ultrasonik. Kemudian, arus menuju unit Trigger untuk memancarkan sinyal ultrasonik. Selanjutnya, pada bagian Echo akan menangkap adanya sinyal pantulan dan arus mengalir ke relay, sehingga led akan berkedip-kedip yang menandakan adanya objek yang melewati atau mendekat ke arah sensor. Jika tidak ada objek yang terdeteksi, led akan hidup secara normal.
4.3 Video Simulasi[Kembali]
5. Download File [Kembali]
Datasheet Transistor NPN (2SC1162)
Datasheet Sensor Ultrasonik HC - SR04
Tidak ada komentar:
Posting Komentar